



NEC、「ティーチング作業自動化AI」を開発 様々な現場でロボット導入・活用を容易に
2020/7/28
NECは、これまでロボット専門家が人手で行っていたティーチング作業を自動化するAI技術「目標指向タスクプランニング」を開発した。ティーチング作業は、作業目標を達成する一連の作業手順の設計、および作業手順に沿ってロボットを動作させる制御命令の作成と設定をする作業で、通常、専門家が行う。本技術により、ロボットを利用する現場の作業者が作業目標を指示するだけで、作業目標を達成する動作をロボットに自動実行させることが可能になり、作業変更が頻発し作業環境が変化しやすい現場でもロボット導入・活用が容易になるという。
出典元:プレスリリース
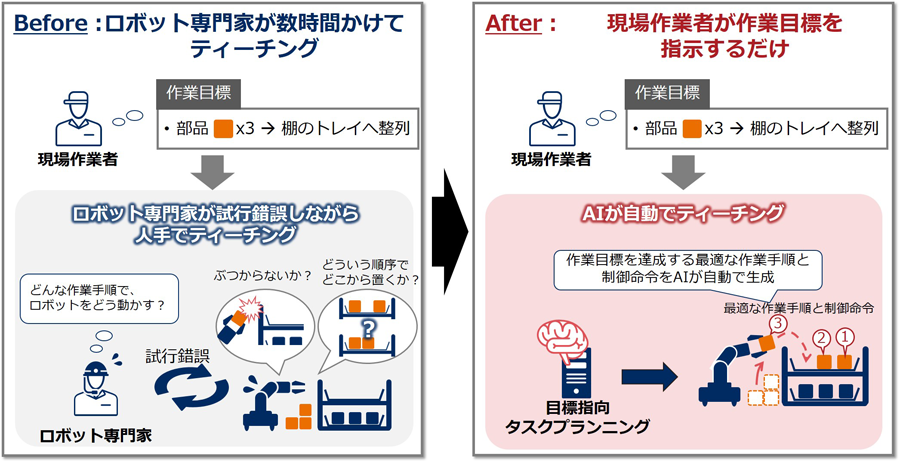
労働力不足の解決手段として、組立業や倉庫業、食品工場をはじめ、作業内容が週・日単位で頻繁に変更になる現場においてもロボット導入の検討が増えている。ロボットに作業をさせるため、一般的には専門家によるロボット動作のティーチングが手動で行われている。特に、物品の整列や箱入れ等のロボットにとって複雑な作業では、作業手順とロボットの動かし方を最適化するための試行錯誤が必要で、作業設定に数時間程度必要だ。そのため、作業変更が頻発する現場では、ロボットの導入あるいは継続的な活用が困難だった。
今回NECは、こうした現場向けに、ロボット専門家によるティーチングがなくてもロボット活用を可能にするAI技術「目標指向タスクプランニング」を開発した。例えば、現場作業者が「複数の部品を棚上のトレイに仕分ける」という作業目標を指示すれば、ばらばらに置かれた複数の部品を適切な順序でピックアップし、棚にぶつからずにトレイに運ぶように、作業手順とロボットの動かし方を自動で最適化する。
今回NECは、こうした現場向けに、ロボット専門家によるティーチングがなくてもロボット活用を可能にするAI技術「目標指向タスクプランニング」を開発した。例えば、現場作業者が「複数の部品を棚上のトレイに仕分ける」という作業目標を指示すれば、ばらばらに置かれた複数の部品を適切な順序でピックアップし、棚にぶつからずにトレイに運ぶように、作業手順とロボットの動かし方を自動で最適化する。
■技術の特長
本技術によるティーチングプロセスの自動化により次の効果が得られる。
1. ロボット稼働までの時間を大幅に短縮
入荷部品の棚入れ作業の場合は、部品や棚の配置に応じた作業手順の作成およびロボット動作の設定に、専門家が人手で2~3時間かけていたが、本技術により自動で数分程度に短縮できる。
2. 設定外の事象に自動で対応
ロボットを設定する場合、棚の付近や作業台に関係ない部材を混入させない等、例外が発生しないように周辺環境を整えておくか、専門家が様々な状態を想定した作業手順を事前に設定しておく必要があった。本技術により、設定外の事象があっても、作業目標の達成に向けた作業手順をその場で自動的に設定し直す。このためロボット用に特別に整備された環境を用意する必要がない。
なお、今回開発した目標指向タスクプランニングの一部は、東京工業大学工学院システム制御系 山北昌毅准教授らのグループとの共同研究の成果で、2020年10月25~29日に米国ラスベガスで開催予定の国際会議IROS2020: IEEE/RSJ Int'l Conf. on Intelligent Robots and Systemsで発表するという。
1. ロボット稼働までの時間を大幅に短縮
入荷部品の棚入れ作業の場合は、部品や棚の配置に応じた作業手順の作成およびロボット動作の設定に、専門家が人手で2~3時間かけていたが、本技術により自動で数分程度に短縮できる。
2. 設定外の事象に自動で対応
ロボットを設定する場合、棚の付近や作業台に関係ない部材を混入させない等、例外が発生しないように周辺環境を整えておくか、専門家が様々な状態を想定した作業手順を事前に設定しておく必要があった。本技術により、設定外の事象があっても、作業目標の達成に向けた作業手順をその場で自動的に設定し直す。このためロボット用に特別に整備された環境を用意する必要がない。
なお、今回開発した目標指向タスクプランニングの一部は、東京工業大学工学院システム制御系 山北昌毅准教授らのグループとの共同研究の成果で、2020年10月25~29日に米国ラスベガスで開催予定の国際会議IROS2020: IEEE/RSJ Int'l Conf. on Intelligent Robots and Systemsで発表するという。

出典元:プレスリリース
ロボット活用領域の拡大を目指して、かねてから協力関係にあるオリックス・レンテック株式会社の常設ロボットショールーム「Tokyo Robot Lab.」に、9月初旬から本AI技術を適用したピック&プレイス自動化ロボットをデモ展示する。本展示では、実物のロボットの動作や操作性を体験できる。さらに、本技術の関連デモは「NEC DX Factory共創スペース」にも実装し、公開している。
























