



パナソニックアドバンストテクノロジーと大成建設、「月面適応のためのSLAM自動運転技術の開発」を継続実施
2023/5/16
パナソニックアドバンストテクノロジー株式会社は、大成建設株式会社と、「月面適応のためのSLAM自動運転技術の開発」に関する研究開発をF/S(フィージビリティ・スタディ)からR&D Stageにステップアップして継続実施すると発表した。
本研究開発は、国土交通省が実施する「宇宙無人建設革新技術開発推進事業」における「宇宙建設革新プロジェクト」として採択されたものだ。

出典元:プレスリリース
国土交通省では、これまで培われてきた無人建設技術(自動化、遠隔化、ICT施工等)について、近年、激甚化する災害対応・国土強靱化に加え、人口減少下において、更なる高度化と現場への普及は喫緊の課題と捉えているという。一方で、宇宙利用探査において世界に先駆けて月面拠点建設を進めるためにも、遠隔あるいは自動の建設技術(無人化施工等)は重要な要素となると位置づけており、アルテミス計画等を通じて月面環境に係るノウハウを有する文部科学省と連携し、月面拠点建設へ適用するための技術開発を進めるとともに地上の事業へ波及させるとしているとのことだ。
GNSS等の測位衛星から位置情報を得ることのできない月面環境で建設機械の自動運転を実現するためには、別の手段で建設機械の位置情報を正確に取得する必要がある。パナソニックアドバンストテクノロジーではこれまでLiDAR SLAM技術による建設機械の自己位置推定技術を開発・実証しており、測位衛星が利用できない地上不整地環境での建設機械の自律移動を実現している。
GNSS等の測位衛星から位置情報を得ることのできない月面環境で建設機械の自動運転を実現するためには、別の手段で建設機械の位置情報を正確に取得する必要がある。パナソニックアドバンストテクノロジーではこれまでLiDAR SLAM技術による建設機械の自己位置推定技術を開発・実証しており、測位衛星が利用できない地上不整地環境での建設機械の自律移動を実現している。

出典元:プレスリリース
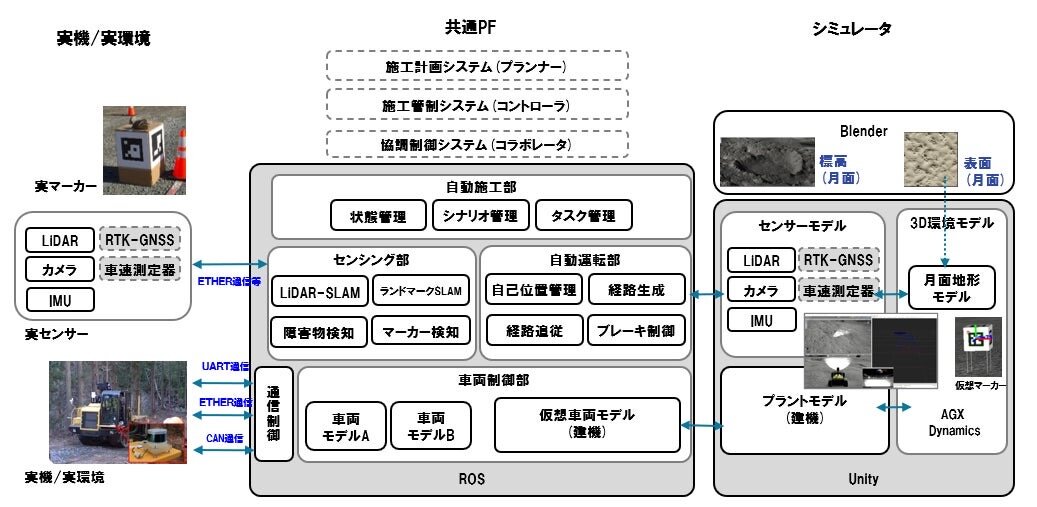
本研究開発では、この技術に、人工的な特徴点を活用するランドマークSLAM技術とカメラから得られる様々な情報を統合することで、月面のような特殊な環境にも適応可能な自動運転技術の構築を目指す。
月面を想定した自動運転技術の研究開発においては、月面を仮想環境で再現したシミュレーション評価が重要な要素となる。パナソニックアドバンストテクノロジーにはこれまで車載開発でモデルベース開発・シミュレーション開発のノウハウ・実績があり、本研究開発では、NASA等より公開されているデータを基に、月面の仮想環境モデルを構築し、仮想環境上でのセンシング技術開発、自動運転技術の評価、精度向上を継続する。
月面を想定した自動運転技術の研究開発においては、月面を仮想環境で再現したシミュレーション評価が重要な要素となる。パナソニックアドバンストテクノロジーにはこれまで車載開発でモデルベース開発・シミュレーション開発のノウハウ・実績があり、本研究開発では、NASA等より公開されているデータを基に、月面の仮想環境モデルを構築し、仮想環境上でのセンシング技術開発、自動運転技術の評価、精度向上を継続する。
出典元:プレスリリース
今後、シミュレーション評価に加え、月面を模した疑似環境での実証実験により、開発技術を現実空間に適応するための課題対応を実施していく計画とのことだ。
























